Resampling
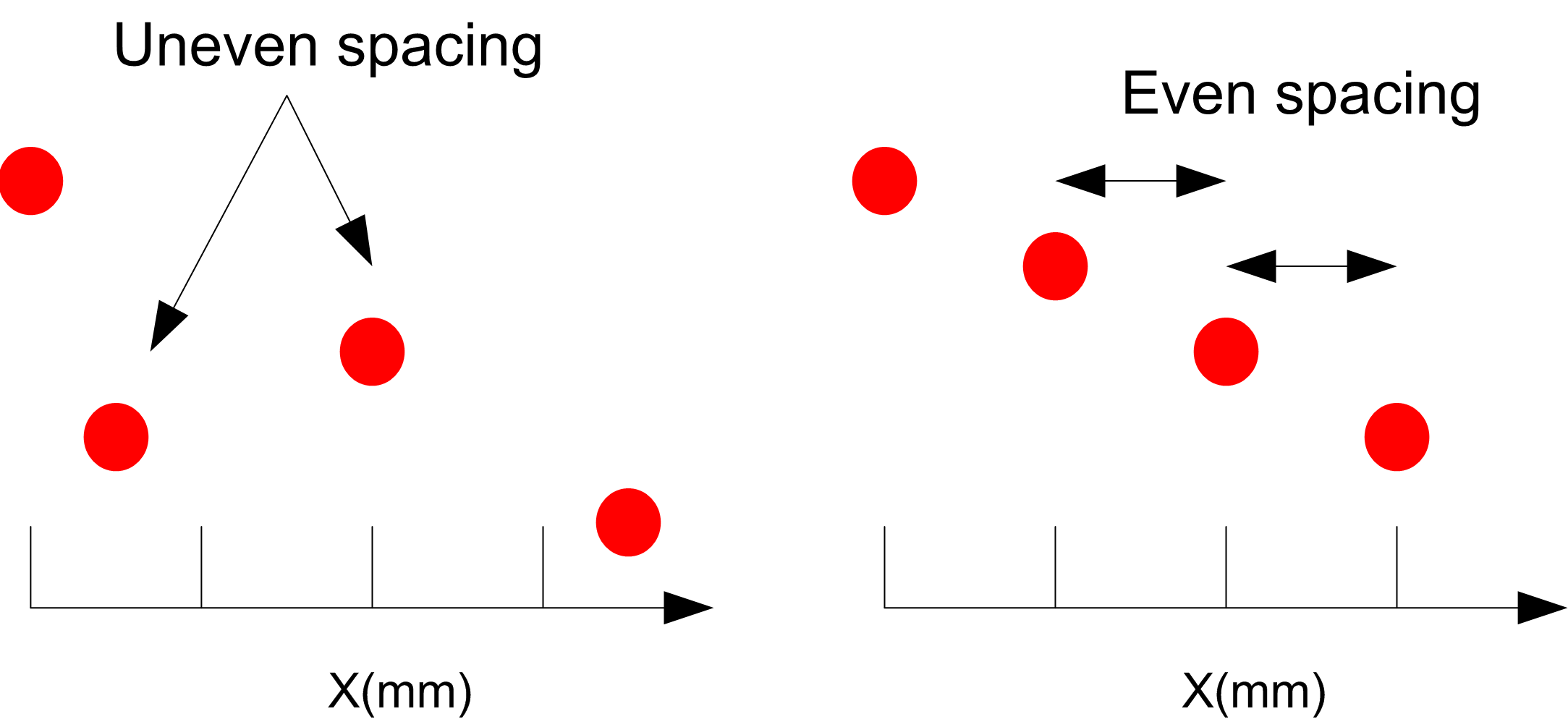
The internal acquisition engine in the sensor produces a random 3D point cloud, where each individual point is a coordinate triplet (X, Y, Z). When the sensor's Uniform Spacing setting is disabled, the sensor returns this point cloud.
When the sensor's uniform spacing setting is enabled, the random 3D point cloud is resampled to an even grid in the XY plane. The resampling divides the XY plane into fixed-size square "bins." 3D points are projected along the Z axis, perpendicular to the XY plane, and points that fall into the same bin will be combined into a single Z value. The size of the resampling bins can be set with the X/Y Spacing Interval setting
In the Ethernet data channel, only the Z values are reported, and the X and Y positions can be reconstructed through the 2D-array index at the receiving end (the client). Resampling reduces the complexity for the algorithms in the sensor's built-in measurement tools, allowing them to run on the embedded processors. All built-in measurement tools in the sensor operate on resampled data in Surface mode.